Controlling self-organized networks with external controllers
Self-organized control is one of key idea for the management of large-scale networks. In self-organization schemes, entirely local information is used for decision making by each node. Self-organization has good scalability, adaptability, and robustness. These properties arise through numerous interactions among local-level system components without external or centralized control processes. Conversely, the bottom-up design of such pure self-organization has the following drawbacks.
Guaranteeing optimal operation is difficult
Confirming operations over the entire network is difficult
Convergence speed after an environmental change is slow
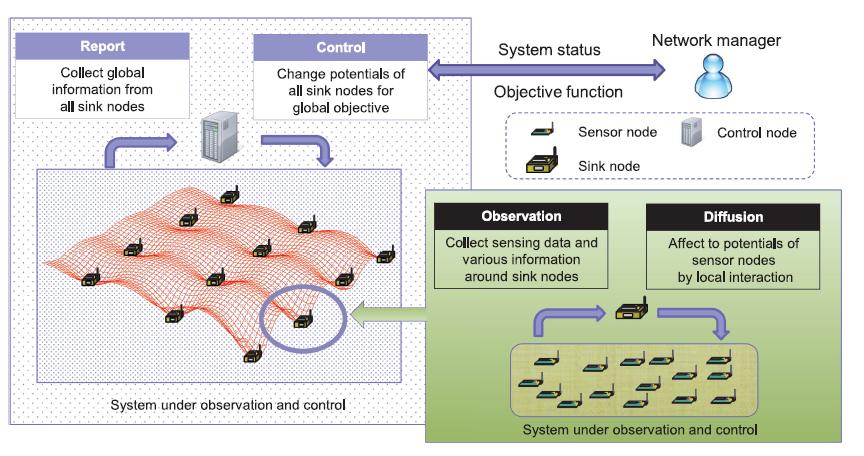
To resolve these problems, we propose a controlled and self-organized routing protocol based on a novel scheme called controlled self-organization. We adopt a potential-based routing as a self-organized routing and apply controlled self-organization scheme to it. In other words, we propose a controlled potential-based routing (CPBR). In potential-based routing schemes, nodes have a scalar value called “potential”, and a next hop is based on only a node’s potential and its neighbors’ potentials. Here, a node calculates its own potential from the potentials, the number of hops from the sink node, or the remaining energy of itself or its neighbors. Basically, the smaller a hop count to the sink node is, the lower is the potential value assigned to it. Therefore, if a node simply transmits data toward one of its neighbor nodes having a smaller potential than its own, the data will eventually reach the sink node. We show that the global traffic flow can be controlled dramatically.
A very simple mechanism can control the direction of global traffic flow, but convergence speed is considerably slow. Then, we focus on the knowledge of control theory, especially robust control. We introduce the functions of state-observation, calculation of the optimal feedback input into an external controller. We show how the controller calculates the future state of the system and provides an optimal feedback for fast and robust convergence of potential-based routing. This shows an upper limit of convergence by an external control in a self-organizing network whose dynamics is extremely linear.
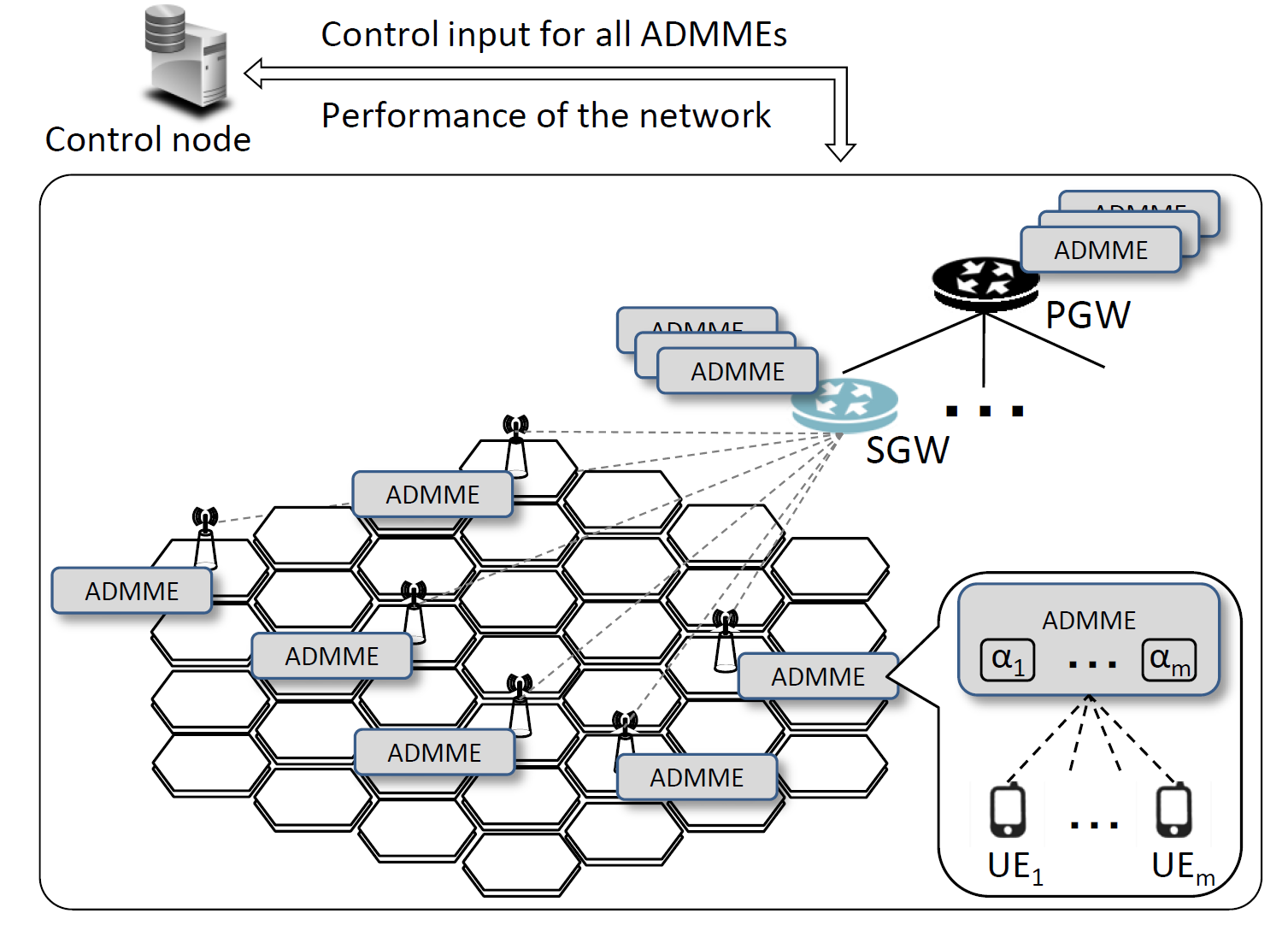
Another our challenge focuses on the mobile management entity in fifth-generation mobile and wireless communication systems. We solve problems in the autonomous and distributed MME (ADMME) selection. An ADMME selection method based on the attractor-selection algorithm was proposed for load balancing between ADMMEs and for suppressing communication delay between an ADMME and its UEs, where each ADMME makes decisions using only local information. We introduce a control node that monitors and manages the network to meet performance requirements and suppress instability. Our proposal is designed to suppress ADMME switching even when considering UE mobility. The control nodes described in this paper induce network performance to a sub-optimal value and suppress connection switching between an ADMME and a UE, so long as doing so does not result in deterioration from the desired performance. To that end, the control node has a feedback mechanism, where it periodically observes the network performance and provides control input to each ADMME according to the observed performance.